新闻中心
产品中心
联系利记SBO·(中国)官方

深圳市利记SBO伺服控制技术有限公司
电话:13316379101
邮箱:1355229533@qq.com
地址:深圳市龙华区民治街道樟坑社区青创城A栋B502
电机选型计算之计算直线运动方法实例
发布时间:2020-10-21 07:34:55
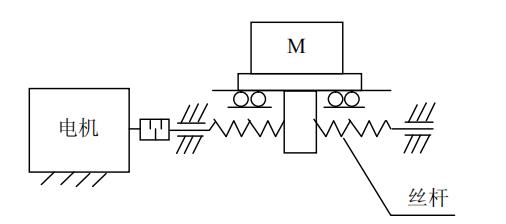
例 1:直线运动
已知:直线平台水平往复运动,最大行程 L=400 mm;
往复运动周期为 T = 2s;
重复定位误差 £ 0.02 mm;
平台运动质量 M = 10 kg,无外力。
求:电机型号、滚珠丝杆导程。
解:
1. 运动学计算:
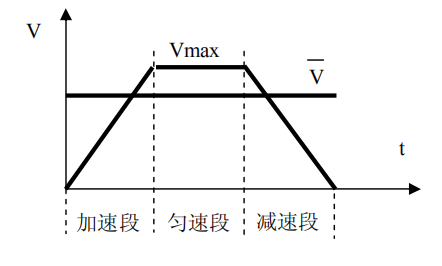
平均速度为:V = 0.4 /1 = 0.4 m /s
设:加速时间为 0.2 S;(步进电机一般取加速时间为:0.1~1 秒)
(伺服电机一般取加速时间为:0.05~0.5 秒)
则加减速时间共为 0.4 S,且其平均速度为最大速度的一半。
故有:L = 0.4 ¥ Vmax / 2 + 0.6 ¥ Vmax = 0.4 m
得: Vmax = 0.4 / 0.8 = 0.5 m/s
所以,加速度为:
验算:加速距离:
匀速距离:
减速距离和加速距离相同,
2. 动力学计算:
F = M a + f
摩擦力 f = m M g,因为滚珠丝杆的摩擦系数m都远小于 0.01,故可先不考虑。导轨的摩擦系
数要查手册,尤其是有预紧力的导轨,摩擦力是很大的。
惯性力: F = M a = 10 ¥ 2.5 = 25 N
丝杆质量相对较小,先不考虑其惯性力。
3. 丝杆导程 S 与电机类型的选择:
已知:Vmax = 0.4 m/s;重复定位误差 £ 0.02 mm
如果选用步进电机:
已知步进电机:最大转速 n = 800~1200 rpm,
可靠的定位精度d = 360 o / m = 360o /200~400 = 0.9 o~1.8 o
( 电机每转脉冲数 m = 200~400 )
因为:线速度 V = n ¥ S
所以:导程为 S = V / n = 0.4 / (1000/60) = 0.024 m/r = 24 mm/r
定位精度d = 24 / 400 = 0.06 mm
显然,用步进电机精度不够;或者说,步进电机速度不够快。
如果选用交流伺服电机:
已知交流伺服电机:最大转速 nmax = 5000 rpm,额定转速为 n = 3000 rpm;
W 系列最高定位分辨率为:360o /217 =360o/131072=0.0027o
因为:线速度 V = n ¥ S
所以:导程为 S = V / n = 0.4 / (3000/60) = 0.008 m/r = 8 mm/r
取导程为 S = 10 mm
定位分辨率e = S / m = 10 / 131072 = 0.000076 mm
定位精度d = e ¥ 10 ª 0.001 mm
(对于伺服电机:分辨率必须比定位精度高一个数量级。)
控制器输出脉冲频率必须达到:
f = (3000/60) ¥ 131072 = 6553600 = 6.6 ¥ 106 Hz = 6.6 MHz
可是,Baldor 卡的最大输出脉冲频率为:3 MHz,所以,定位分辨率太高,也不行。
而且,即使控制器输出频率足够高,该运动平台的定位精度也不能达到 0.001 mm。
要达到微米级精度必须使用光栅尺。
设置伺服电机的电子齿轮比,
使:电机每转脉冲数 m = S / e = 10 / 0.002 = 5000 脉冲/转,即可
即:电子齿轮比为:131072/5000 = 26.2144。
4.电机力矩的选择:
因为,丝杆的推力和输入力矩的关系为:F = 2p×T / S
所以,电机的力矩为:T = F×S / 2p = 25×0.01 / 2p = 0.04 Nm
考虑到丝杆的效率、导轨的摩擦力、安装误差造成的各种阻力,利记SBO·(中国)官方要加 2~3 倍
的安全系数。
故,电机的力矩为 Tm = 0.04×3 = 0.12 Nm
选用富士 W 系列 50W AC 伺服电机,其额定输出力矩为:0.159 Nm。
老板要工程师提高机器的效率,问:采用此电机,该平台可以跑到多快的速度?
- 上一篇:两相步进电机a十a一b十b一原理图解
- 下一篇:步进电机计算旋转运动实例方法
产品推荐:两相步进电机



产品推荐:无刷电机







产品推荐:两相步进驱动器






产品推荐:直流无刷驱动器






 地址 ADDRESS
地址 ADDRESS